Federation
Federation, part of Layer 1, is responsible for synchronizing the state between robot and cloud clusters. Configuration state in Cloud Robotics Core is primarily expressed through custom resources by platform and user applications alike. Our federation system enables other components to use custom resources locally without needing to be aware of the multi cluster setup and the quality of the network connection.
Semantics
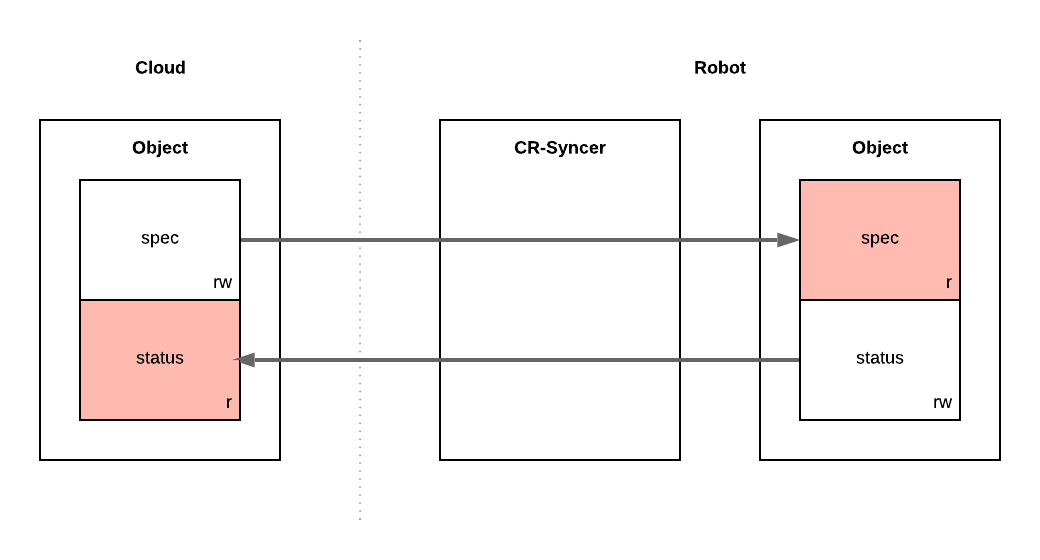
A Kubernetes resource is typically divided into a “spec” and a “status”
section. The spec section expresses the intent of the resource, typically authored by a user
or another application along with all its metadata.
The status section must generally only be written to by the controller that is responsible for
realizing the specification. Consequently, spec and status typically each have one distinct
author.
For federating resources, this means that spec and status of a resource are owned by at most
one cluster respectively (possibly the same one). The cluster owning the spec is also the main
owner of the resource overall and controls its lifecycle, i.e. deletion.
A resource’s spec is always synced from an upstream cluster to a downstream
cluster and its status synced back from downstream to upstream.
All resources of a specific type may either be synchronized to all robots or to exactly one robot. There is no direct synchronization between robots. However, a robot may create a resource in the cloud cluster that will be distributed to other robots.
If a resource owned by the upstream cluster has been synchronized to one or more downstream clusters, it can only be permanently deleted upstream: if deleted downstream, it will be recreated. If deleted in the upstream cluster, it will be asynchronously deleted in other clusters that hold a copy of the resource. Upstream deletion can complete before the downstream resource is deleted.
cr-syncer
The cr-syncer component (Custom Resource Syncer) is a controller that runs inside each robot cluster. It is connected to the Kubernetes API servers of the cloud and the robot cluster alike and continuously watches for updates on custom resources. The controller contains retry and resync logic to address intermittent connectivity.
The behavior of the cr-syncer can be configured per custom resource definition (CRD) by setting annotations on its CRD:
cr-syncer.cloudrobotics.com/spec-source: may becloudorrobot. It determines which cluster type owns metadata, spec, and lifecycle of all resources of the CRD. It implies that the other cluster type owns the status section.cr-syncer.cloudrobotics.com/filter-by-robot-name: a boolean that determines whether resources will be synced to all robots or just a single one. An individual resource is labeled withcloudrobotics.com/robot-nameto indicate which robot it should be synced to. If the label is missing on a resource, it will not be synced at all.cr-syncer.cloudrobotics.com/status-subtree: a string key, which defines which sub-section of the resource status is synced from the downstream cluster. This lets you split a resource’s status intorobotandcloudsections, for example. Using this annotation is generally discouraged as it likely points to a flaw in the modeling of the respective CRD.
Deletion
When the cr-syncer sees a resource in the downstream cluster with no corresponding resource in upstream cluster, it deletes it. This handles orphaned resources when the upstream resource was deleted while the cr-syncer was restarting. It also means that you can’t create a resource directly in the downstream cluster. The upstream resource is identified using the namespace and name, but not the UID, so deletion and recreation upstream may result in an update in the downstream cluster.
Note: if you create a resource directly in the downstream cluster, the behavior will depend on how the CRD is annotated. If
filter-by-robot-nameis false, the cr-syncer will delete all downstream resources that don’t correspond to upstream resources. This means that by listing CRs in the upstream cluster, you can reason about which CRs will exist in the downstream cluster.If
cr-syncer.cloudrobotics.com/filter-by-robot-nameis true, then the cr-syncer will ignore any downstream resources that are not labelled with a matching robot name. This means that a robot can run ChartAssignments that are synced from the cloud as well as those created directly in the robot cluster.
In some cases, downstream deletion may be blocked. For example, if we have deleted an upstream ChartAssignment, but the chart-assignment-controller has failed to remove its finalizer from the downstream ChartAssignment. This edge case leads to surprising behavior:
- An upstream ChartAssignment can be recreated before the downstream ChartAssignment is deleted.
- The old status from the downstream cluster will be synced to the new upstream ChartAssignment.
If needed, this can be detected by watching the downstream cluster after deleting the resource from the downstream cluster. The situation will clean up once downstream deletion is complete.
Note: previously, the cr-syncer used finalizers to block upstream deletion until the downstream resource was deleted. This gave the original deleter more information: for example, once an AppRollout had been deleted in the cloud, it means that all robots have terminated the app’s pods. However, this caused problems with offline or renamed clusters: an admin would have to manually clean up the old finalizers. The new asynchronous behavior is not affected by offline clusters.
Resource generations
Custom resources have a field .metadata.generation that starts at 1 and is
incremented when the resource changes. Specifically, if the CRD enables the
/status subresource, the generation increases by 1 every time the resource spec
changes, but not when the status changes. The resource controller can set
.status.observedGeneration to the latest generation it has observed, so the
user can change the spec, then wait for observedGeneration to catch up before
looking at the status. For example:
- Create a Deployment for one pod (generation=1), and wait for the status to be Ready.
- Change the Deployment’s image reference (generation=2): the status is still Ready, but this refers the old spec (observedGeneration=1).
- Wait for the status to update (observedGeneration=2): now the status is non-ready, referring to the newer spec.
- Wait for the status to be Ready. The new image is now running.
generation and observedGeneration can only be compared in the downstream
cluster. As the generation is managed by the Kubernetes apiserver, the
cr-syncer cannot guarantee that the upstream generation matches the downstream
generation. On the other hand, observedGeneration will be copied from
downstream to upstream with the rest of .status. This means that generation
is cluster-specific but observedGeneration always refers to the downstream
generation.